Assembly Programming on Atmega328p
Lecture 1
The Atmega328p microcontroller is a small computer on a single integrated circuit which contains a processor core, memory and programmable input and output peripherals.
Why assembly?
-
Code is optimized for speed & space;
-
Assembly coding enables you to learn H/W organization of microcontroller;
-
Assembly code can take full advantages of controller H/W features;
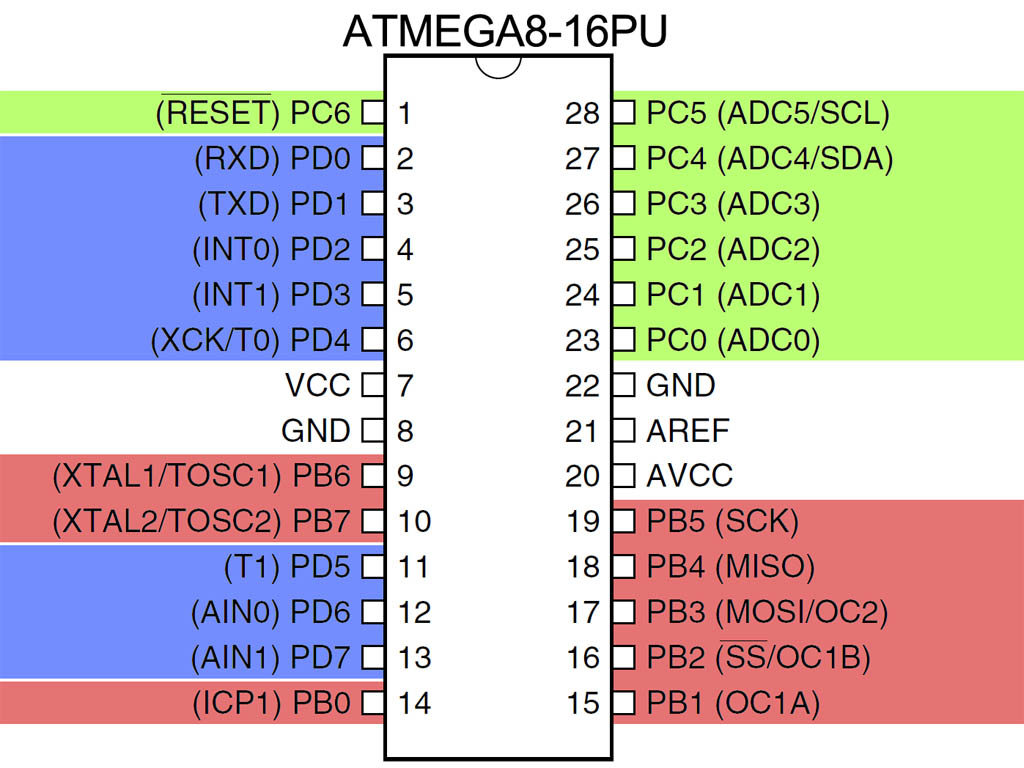
Hardware Organization
Instruction Set
Arithmetic and Logic |
ADD |
SUB |
AND |
OR |
MUL |
Branch |
JMP |
RCALL |
RET |
CPI |
BREQ |
Data transfer |
MOV |
In |
OUT |
LDI |
STS |
Bit-by-bit test |
ROL |
CBI |
CLC |
SWAP |
ROR |
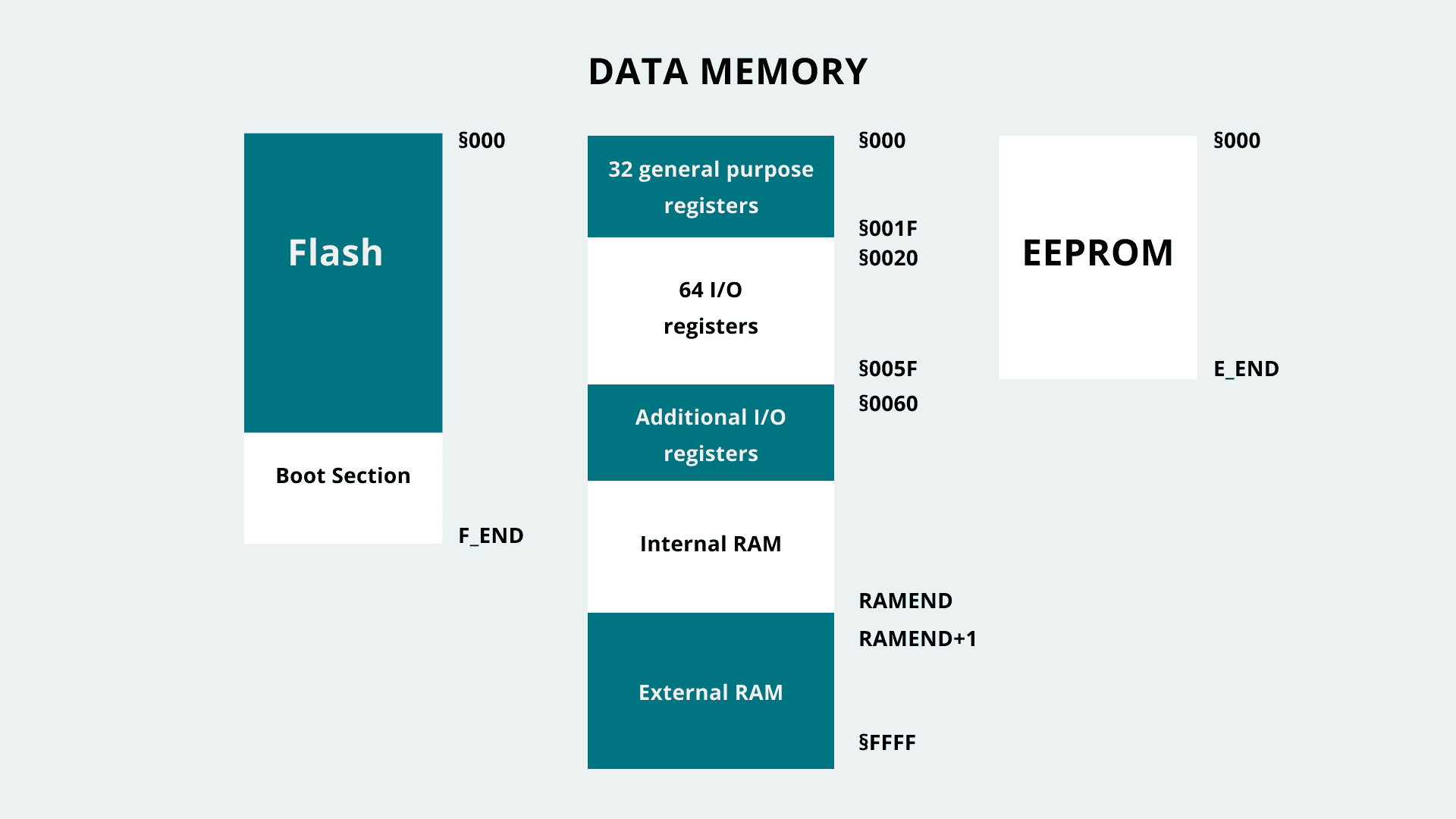
Memory Map
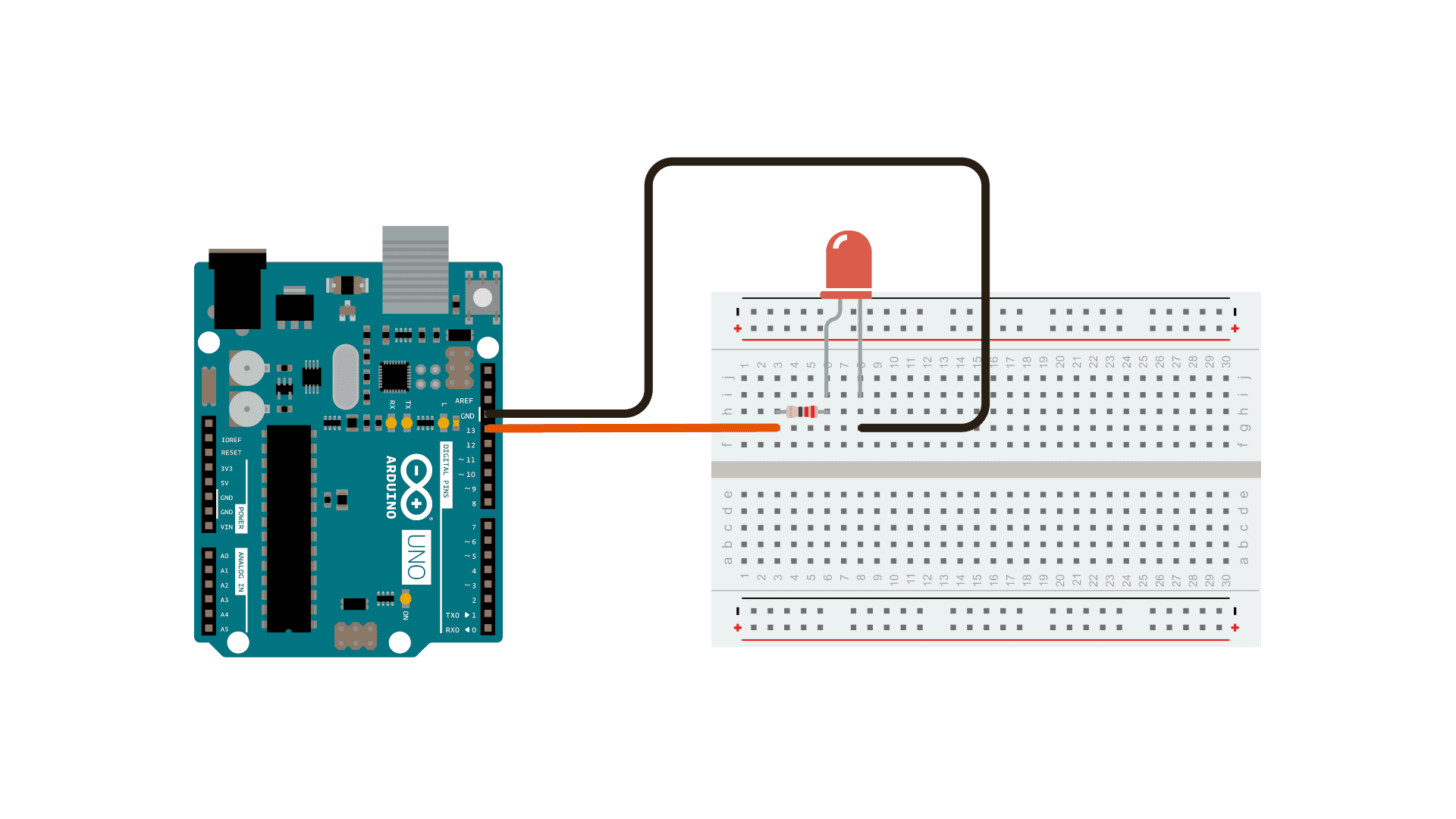
Blink led
The purpose of this section is to provide the fundamentals for building an example to turn an LED on and off. This objective will be achieved through the analysis of the programs led.ino and led.S built using functions from the AVR Instruction Set Manual.
Item |
Quantidade |
Plataforma Arduino |
1 |
Cabo USB |
1 |
Protoboard |
1 |
Led |
1 |
Resistor de 200 ohms |
1 |
Code
We need to create two files. The first file in c++ (extension .ino) and the second file in assembly (extension .S). Both with the same name and in the same directory.
//------------------------- // C Code for Blinking LED //------------------------- extern "C"{ void start(); void led(byte); } void setup(){ start(); } void loop(){ led(1); delay(200); led(0); delay(200); }
;--------------- ; Assembly Code ;--------------- #define __SFR_OFFSET 0x00 #include "avr/io.h" ;------------------------ .global start .global led ;------------------------ start: SBI DDRB, 5 ;set PB5 (D19) as i/o RET ;return to setup() function ;--------------------------------------------------------------------------- led: CPI R24, 0x00 ;value in R24 passed by caller compared with 0 BREQ ledOFF ;jump (branch) if equal to subroutine ledOFF SBI PORTB, 5 ;set D19 to high RET ;return to loop() function ;--------------------------------------------------------------------------- ledOFF: CBI PORTB, 5 ;set D19 to low RET ;return to loop() function ;---------------------------------------------------------------------------
Blink (advanced level)
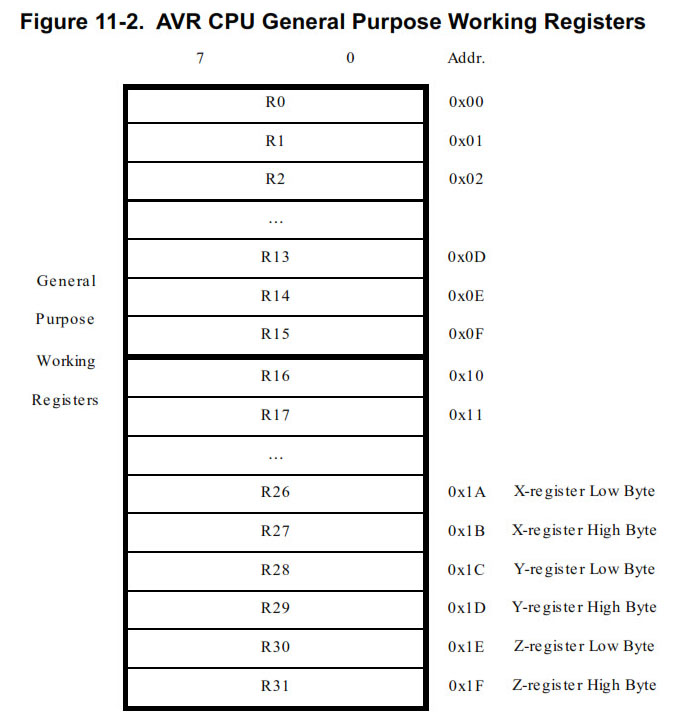
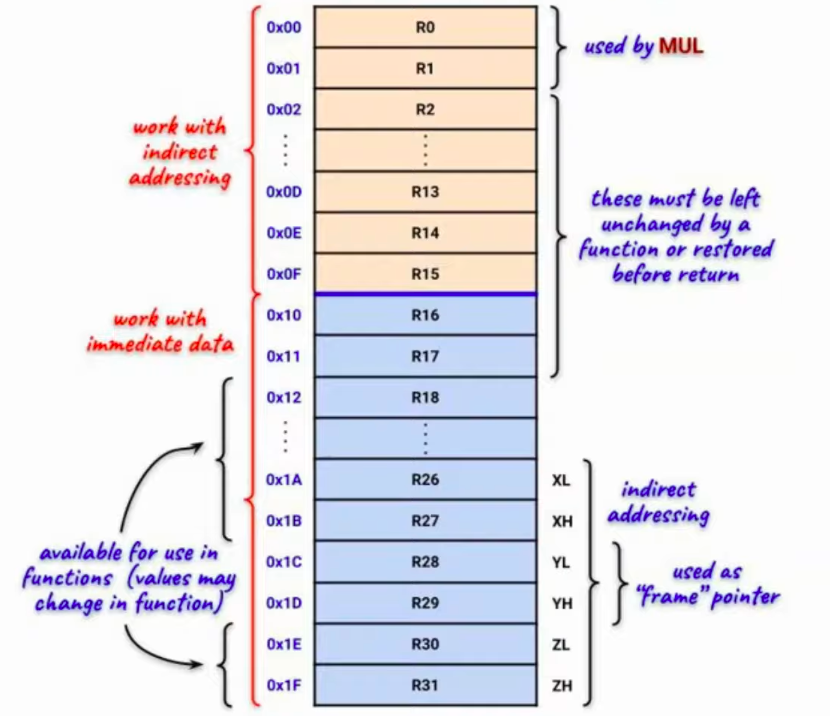
Registers
ATMega328P has 32 general purpose registers [Registers R0 to R31]
-
8 bit registers
-
Mapped to SRAM memory [Addresses between 0x00 and 0x1F]
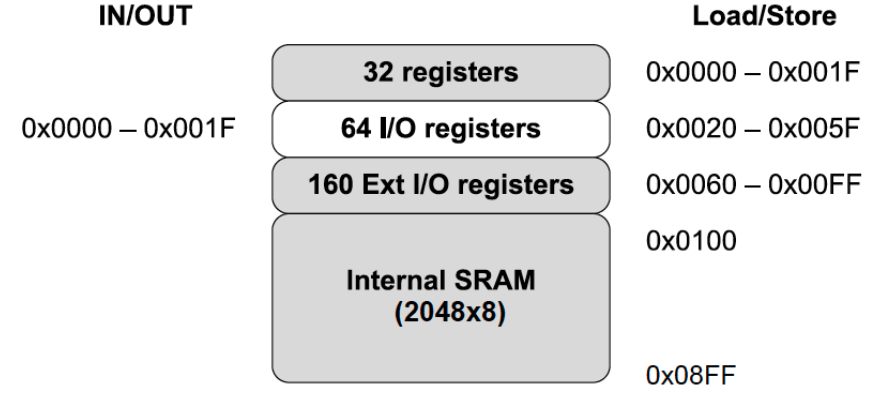
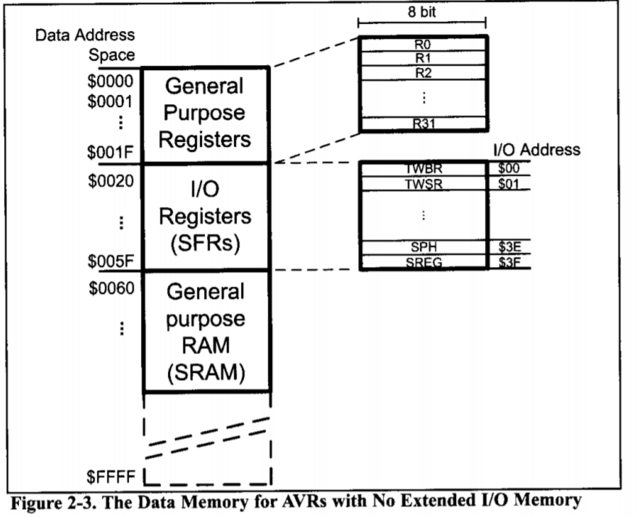
SRAM
ATMega328P has 2 Kbytes of main memory implemented with SRAM
-
Some segments are reserved
-
0x00 to 0x1F are the 32 registers
-
0x20 to 0x5F are I/O registers (Memory mapped I/O)
-
Instruction format
-
Most instructions occupy 16 bits
-
There are several formats of instruction
-
Variable length opcodes
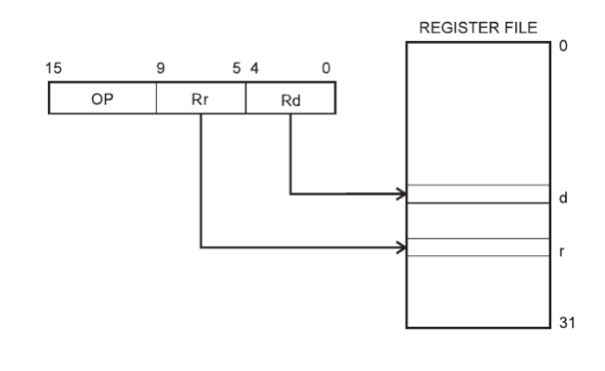
Ex. Register Direct
-
Op: Opcode
-
Rr: Source register 1
-
Rd: Source 2 and destination register
Assembly instructions
-
Assembly instructions follow the same order used in MIPS
-
OPCODE destination, source
-
ldi r16,0xF (Load immediate 0xF into register r16)
-
-
The number of operands varies according to the operation
Code (advanced level)
.global main ;defining a global function .type main, @function ;defining the type main: ldi r16,0b00100000 ;ldi loads an immediate into registers 16 through 31. ldi r17,0b00000000 ; The “register” DDRB (Section 14.4 of the manual), which is at address 0x4, ; configures the pins of port B are for input (0) or output (1). ; out loads to the I/O address the value that is stored in the register ; Loading 0b00000001 to address 0x4, making pin 5 of Port B used as output, ; and the others as input out 0x04,r16 LOOP: ; Register PORTB (address 0x5) defines whether a high or low signal is sent ; to the output pins of port B. Let's send logic 1 (5 volts) into PB5. out 0x05,r17 jmp LOOP ; Jump to loop label (infinite loop)
# # Makefile # FILENAME = led PORT = /dev/cu.usbserial-A600BOBB DEVICE = atmega328p PROGRAMMER = arduino # BAUD can be 115200, 74888, 57600 BAUD = 57600 COMPILE = avr-gcc -Wall -Os -mmcu=$(DEVICE) default: compile upload clean compile: $(COMPILE) -o $(FILENAME) $(FILENAME).s upload: avrdude -v -p $(DEVICE) -c $(PROGRAMMER) -P $(PORT) -b $(BAUD) -U flash:w:$(FILENAME) clean: rm $(FILENAME)
Lecture 2
ATmega328p MCU registers
-
Registers divided into two groups based on how they are used and their functionalities
-
R16 to R31 are more versatile and useful than R0 to R15
-
Example:
-
The registers that work with immediate data (R16 to R31) store a byte of information or words (pairs of registers x, y and z).
-
//------------------------- // C Code //------------------------- extern "C"{ void start(); } void setup(){ start(); } void loop(){ }
;--------------- ; Assembly Code ;--------------- #define __SFR_OFFSET 0x00 #include "avr/io.h" ;------------------------ .global start ;------------------------ start: LDI R16, 0xFF ;load immediate byte 0xFF into register ; LDI R15, 0xFF ;trying to use a different register RET ;return to setup() function ;---------------------------------------------------------------------------
-
On the other hand, registers R0 to R15 work with indirect addressing, which means that we can store a byte located in a memory location. This code will also work with R16 and R17, but its contents cannot be changed by functions.
//------------------------- // C Code //------------------------- extern "C"{ void start(); } void setup(){ start(); } void loop(){ }
;--------------- ; Assembly Code ;--------------- #define __SFR_OFFSET 0x00 #include "avr/io.h" ;------------------------ .global start ;------------------------ start: LDS R12, 0x200 ;load direct from data space byte at memory ;location 0x200 into register RET ;return to setup() function ;---------------------------------------------------------------------------
-
The 3 word registers x, y and z can handle indirect addressing and immediate storage. The y-register can be for storing the frame point
-
R0 and R1 store the 16-bit result of a multiplication performed by opcode MUL. Mul will multiply 2 bytes and its 16-bit result is stored in R1 (MSB) and R0 (LSB)
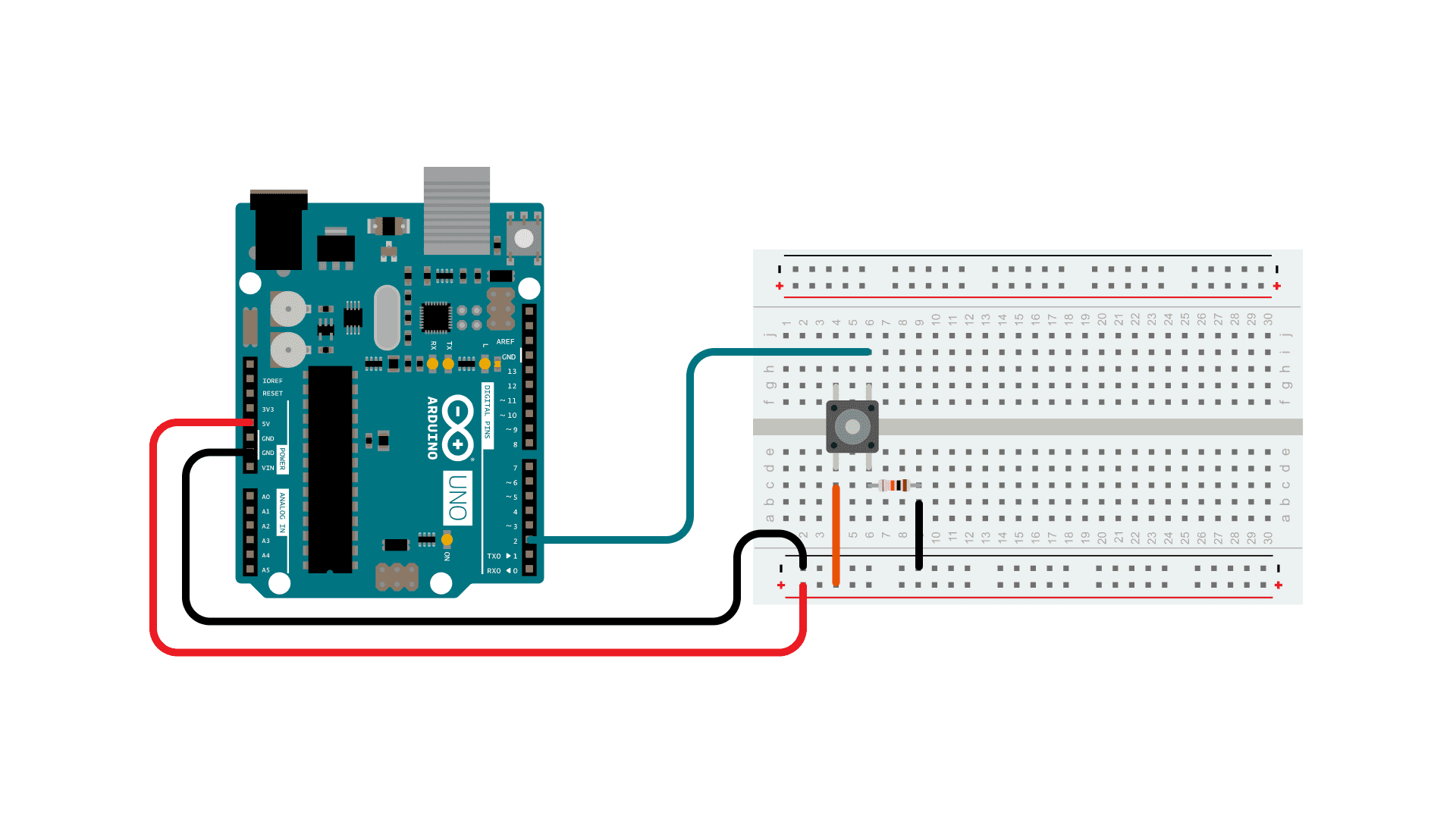
Button controlling an Led
The purpose of this section is to provide the fundamentals to control an LED using a button. This objective will be achieved through the analysis of the programs button.ino and button.S built using functions from the AVR Instruction Set Manual.
Item |
Quantidade |
Plataforma Arduino |
1 |
Cabo USB |
1 |
Protoboard |
1 |
Led |
1 |
Resistor de 200 ohms |
1 |
Resistor de 10K ohms |
1 |
Botão |
1 |
//------------------------------------ // C Code to control led using button //------------------------------------ extern "C"{ void start(); void btnLED(byte); } void setup(){ start(); } void loop(){ btnLED(2); delay(200); }
;--------------- ; Assembly Code ;--------------- #define __SFR_OFFSET 0x00 #include "avr/io.h" ;------------------------ .global start .global btnLED ;------------------------ start: SBI DDRB, 5 ;set PB5 (13) as output CBI DDRD, 2 ;set PD2 (2) as input RET ;return to setup() function ;--------------------------------------------------------------------------- btnLED: ledON: ;SBIC = Skip if Bit in Register is Cleared ;SBIS = Skip if Bit in Register is Set SBIC PIND, 2 ;skip next statement if button not pressed RJMP ledOFF ;jump to ledOFF SBI PORTB, 5 ;set D19 to high RJMP ledON ;return to label ledON ledOFF: CBI PORTB, 5 ;turn OFF LED if button is not pressed RET
Lecture 3
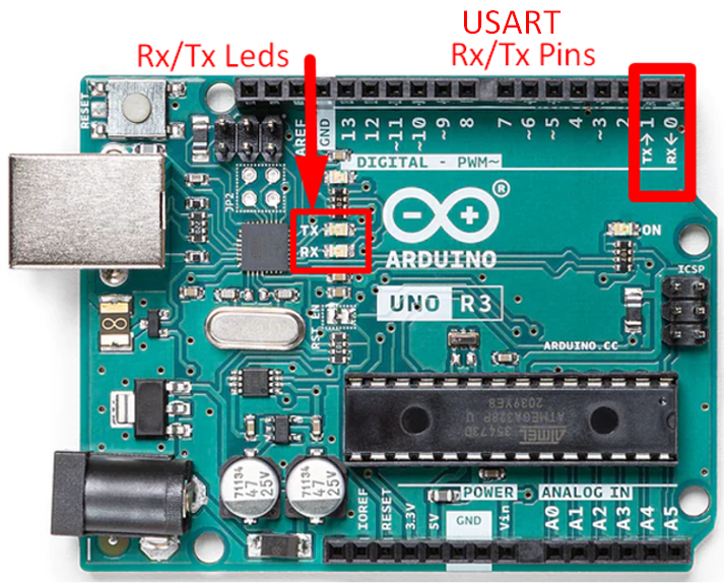
Serial Communication
Program serial port to transmit/receive data using synchronous or assynchronous modes (USART).
USART Registers

-
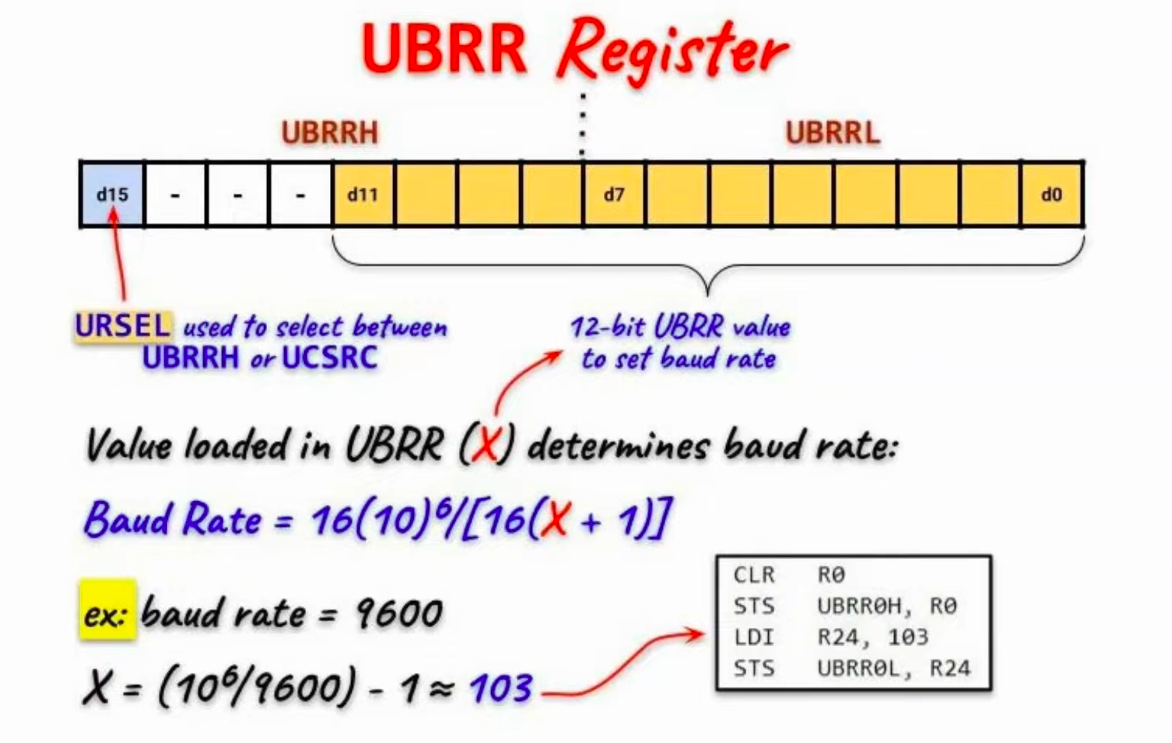
UBRR
-
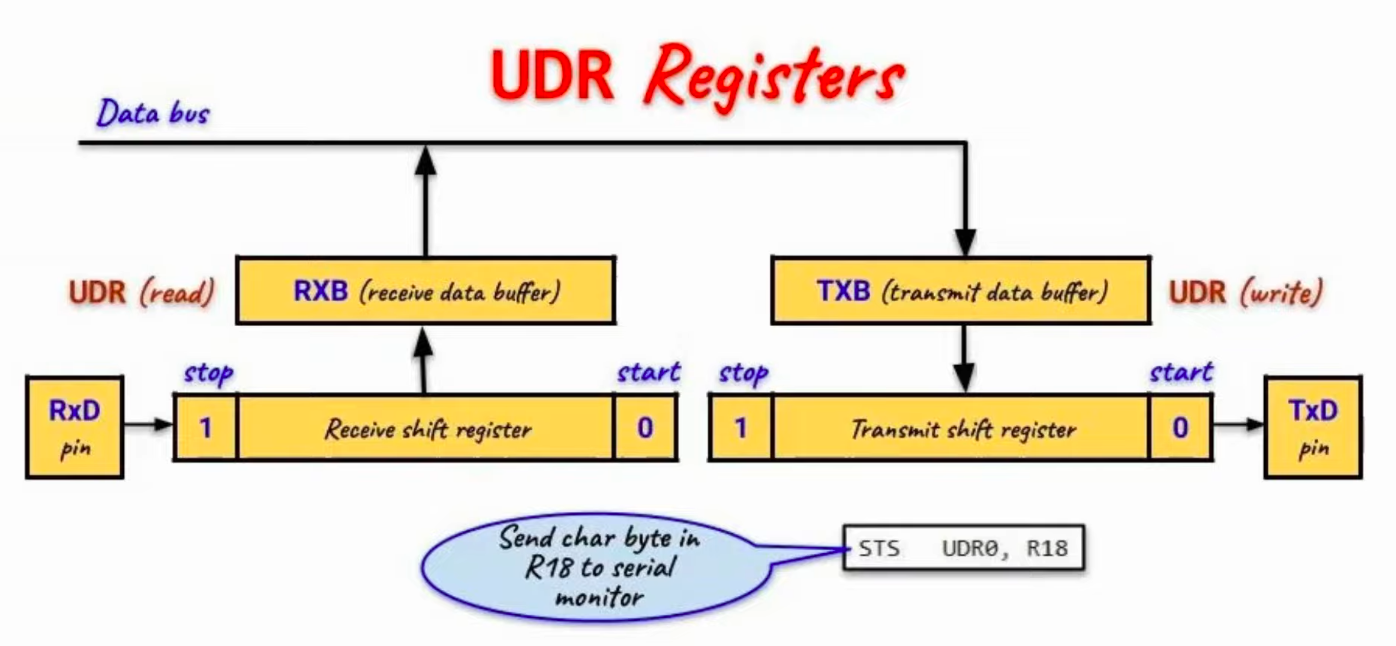
UDR
-
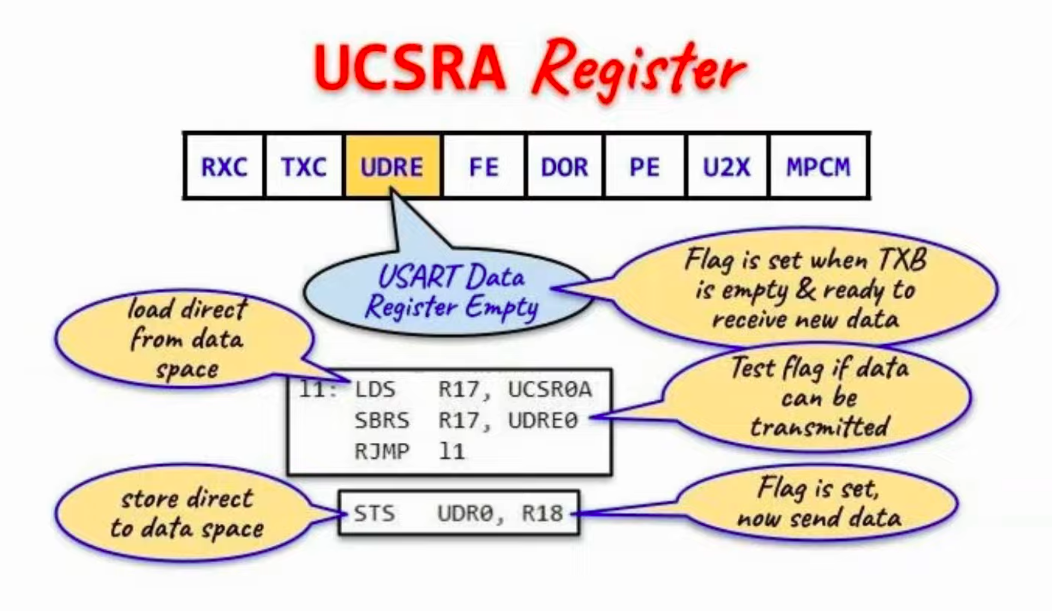
UCSRA
-
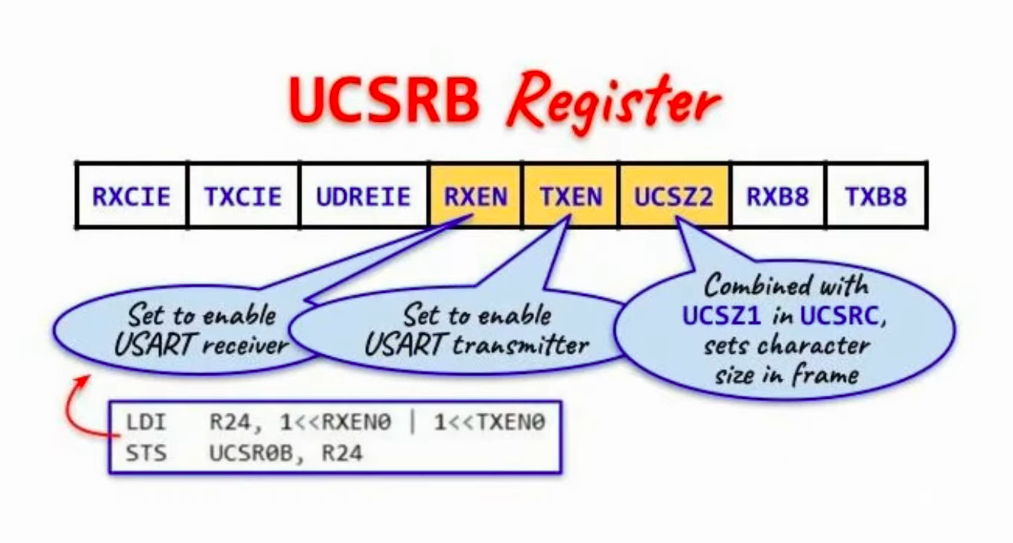
UCSRB
-
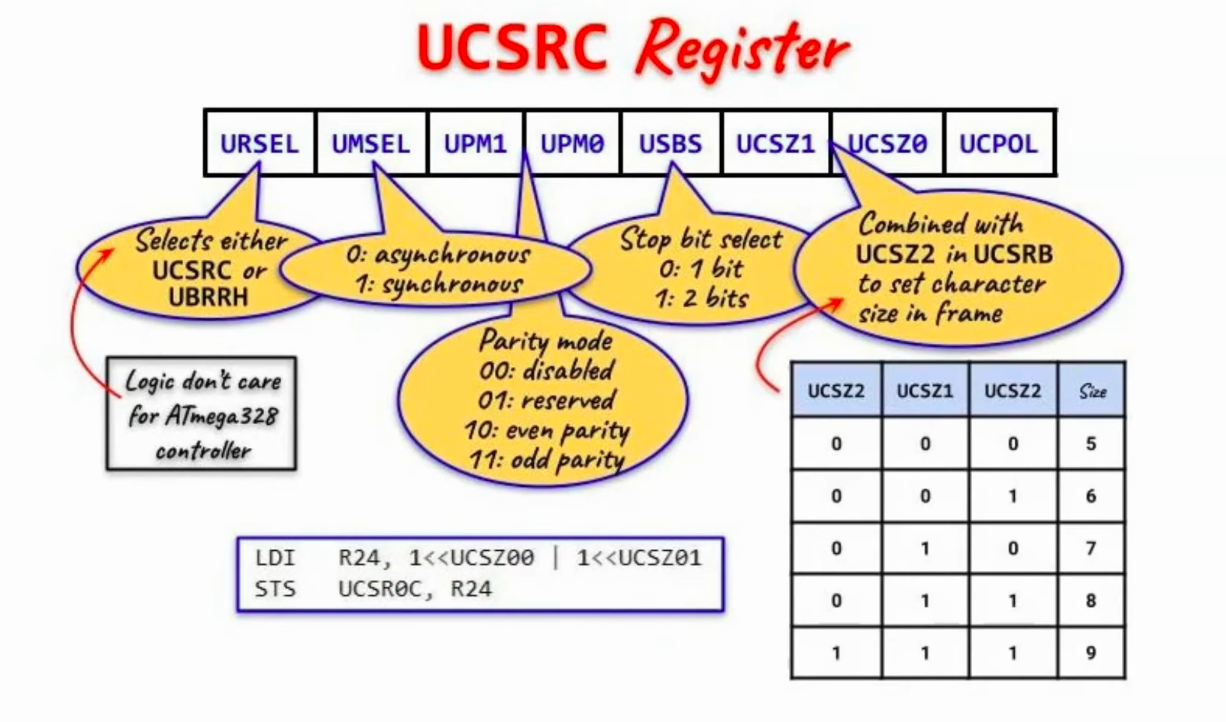
UCSRC
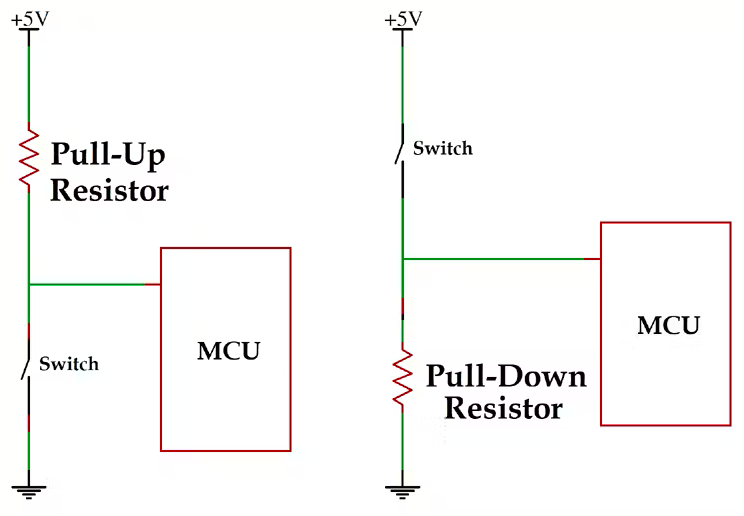
Review about registers
Write on Serial Port
The purpose of this section is to provide the fundamentals to send mensage from Atmega328p to PC. This objective will be achieved through the analysis of the programs serial.ino and serial.S built using functions from the AVR Instruction Set Manual.
Item |
Quantidade |
Plataforma Arduino |
1 |
Cabo USB |
1 |
//------------------------------------------------ // Programming Serial Port - Printing Text Message //------------------------------------------------ extern "C" { void init_serial(); void print_msg(); } //---------------------------------------------------- void setup() { init_serial(); } //---------------------------------------------------- void loop() { print_msg(); }
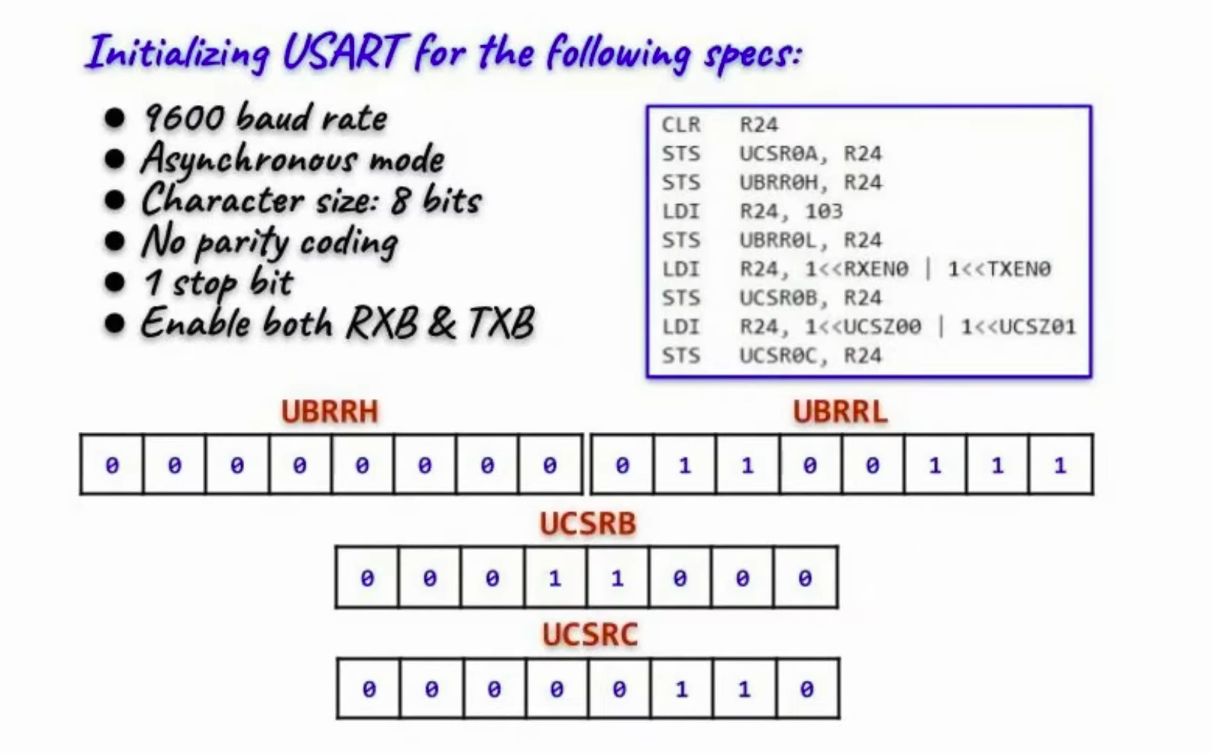
;------------------------ ; Assembly Code ;------------------------ #define __SFR_OFFSET 0x00 #include "avr/io.h" ;------------------------ .global init_serial .global print_msg ;------------------------ init_serial: CLR R24 STS UCSR0A, R24 ;clear UCSR0A register STS UBRR0H, R24 ;clear UBRR0H register LDI R24, 103 ;& store in UBRR0L 103 value STS UBRR0L, R24 ;to set baud rate 9600 LDI R24, 1<<RXEN0 | 1<<TXEN0 ;enable RXB & TXB STS UCSR0B, R24 LDI R24, 1<<UCSZ00 | 1<<UCSZ01;asynch, no parity, 1 stop, 8 bits STS UCSR0C, R24 RET ;------------------------------------------------------------------------- print_msg: LDI R30, lo8(message) LDI R31, hi8(message) ;Z points to string message agn:LPM R18, Z+ ;load char of string onto R18 CPI R18, 0 ;check if R18=0 (end of string) BREQ ext ;if yes, exit ;-------------------------------------------------------------------- l1: LDS R17, UCSR0A SBRS R17, UDRE0 ;test data buffer if data can be sent RJMP l1 STS UDR0, R18 ;send char in R18 to serial monitor ;-------------------------------------------------------------------- RJMP agn ;loop back & get next character ;-------------------------------------------------------------------- ext:RCALL delay_sec RET ;------------------------------------------------------------------------ message: .ascii "Programming Serial Interface!" ;even number of characters!!! .byte 10,13,0 ;newline character, enter and null character ;------------------------------------------------------------------------ delay_sec: ;3s delay LDI R20, 255 l4: LDI R21, 255 l5: LDI R22, 255 l6: DEC R22 BRNE l6 DEC R21 BRNE l5 DEC R20 BRNE l4 RET